Автономное управление дроном
<!-- <div class="gallery">
<p align="left">
<a href="https://vk.com/doc255448427_669694981?hash=MTE0lSz5X59NvMOLIt0KkYVFtRbug1VinmQfCEK9R10&dl=NV3FF0EsXyuVGv6Bihk4AGMz1p4s90l8yi6nO6rkQYk" ><img class="" src="https://ya-rostislav.ru/wp-content/uploads/2019/10/Ryze-Tech-Tello-Boost-Combo.jpg" alt="" width="100%"/></a>
</div> -->
### Проект направлен на разработку системы, которая позволит автоматически обнаруживать заданные объекты при помощи беспилотного летательного аппарата.
**Основные задачи проекта:**
1. Разработка программы для управления дроном в мануальном режиме.
1. Разработка алгоритма детектирования объектов на основе обработки и анализа изображений.
1. Разработка программы для автономного управления в зависимости от получаемых с камеры данных.
1. Тестирование системы на различных локациях и в различных условиях.
Для реализации проекта был выбран дрон – DJI Tello, так как он обладает возможностью передачи информации с камеры по wi-fi и прост в управлении.
<div class="text-center">
*Схема взаимодействия с дроном*
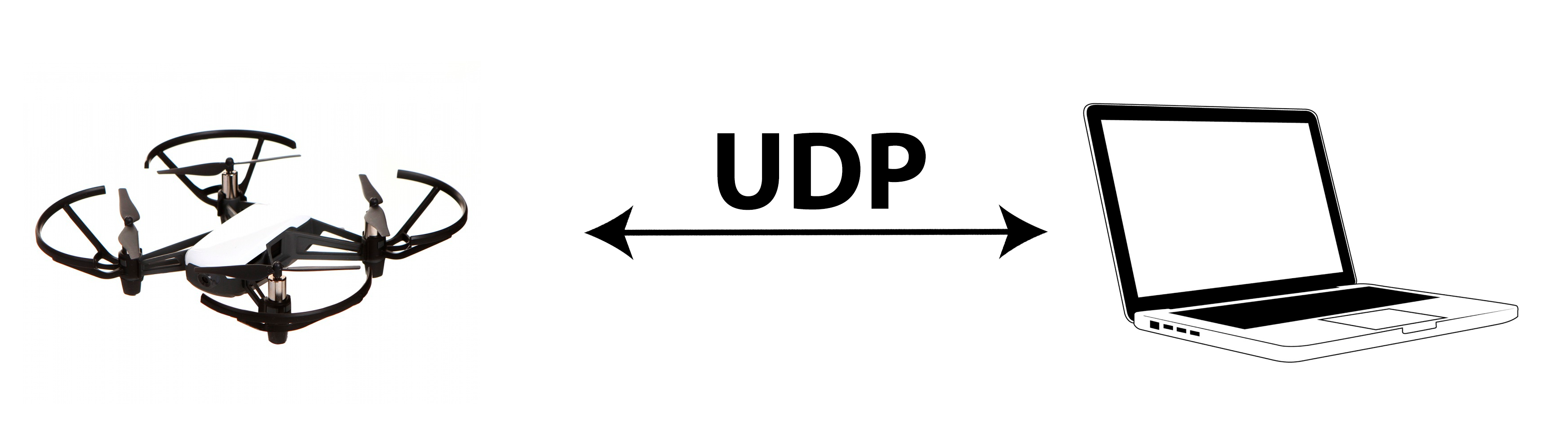
</div>
**Ручное управление**
Чтобы тестировать базовые летальные возможности дрона был разработан ручной режим управления. В нем дрон устанавливает соединение и ожидает команды.
<div class="text-center">

</div>
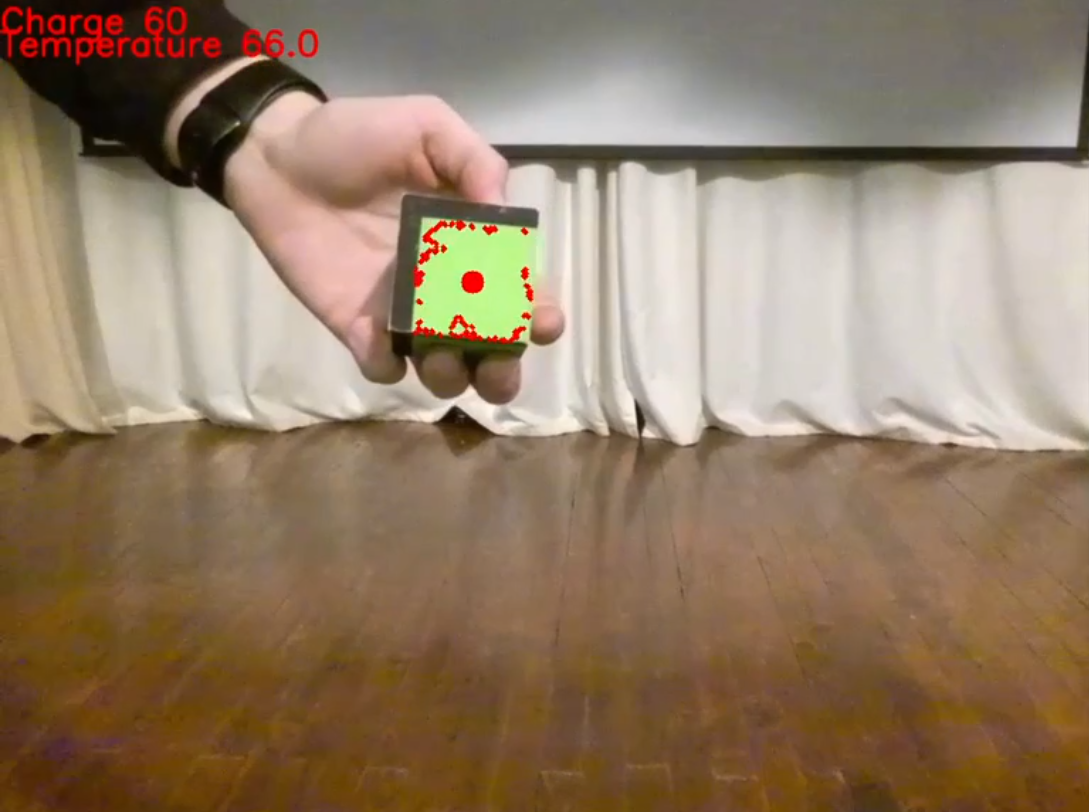
**Разработка алгоритма детектирования**
Алгоритм принимает изображение и цвет объекта. Затем начинается процесс бинаризации, таким образом получается черно-белое изображение, где белые пиксели обозначают объекты указанного цвета. Далее применяется контурный анализ и фильтрация шумов, после чего находится координата центра искомого объекта.
Для реализации данного алгоритма был выбран Python и библиотека OpenCV для компьютерного зрения.
<div class="text-center">
</div>
**Разработка программы для автономного управления**
Чтобы получить изображение с дрона, программа запущенная на ПК, отправляет запрос. Затем проанализировав изображение по алгоритму указанному выше, вычисляется необходимый угол поворота в зависимости от удаления центра объекта от центра кадра и посылается соответствующая команда.
<div class="text-center">

</div>
**Тестирование системы на различных локациях и в различных условиях**
Проект тестировался в закрытом помещении в учебной аудитории при разном освещении и показал хорошие результаты.